Would selling PG&E’s Diablo Canyon nuclear plant be such a bad thing? Sanluisobispo.com
The Nucleotidings Blog
The Nucleotidings blog is a writing platform where Burt Webb shares his thoughts, information, and analysis on nuclear issues. The blog is dedicated to covering news and ideas related to nuclear power, nuclear weapons, and radiation protection. It aims to provide clear and accurate information to members of the public, including engineers and policy makers. Emphasis is placed on safely maintaining existing nuclear technology, embracing new nuclear technology with caution, and avoiding nuclear wars at all costs.
Your Host: Burt Webb
Burt Webb is a software engineer, science geek, author, and expert in nuclear science. Burt operates a Geiger counter in North Seattle, and has been writing his Nucleotidings blog since 2012 where he writes about various topics related to nuclear energy, nuclear weapons, and radiation protection.
Burt Webb has published several technical books and novels. He works as a software consultant.
Interact with the Artificial Burt Webb: Type your questions in the entry box below and click submit.
Example Q&A with the Artificial Burt Webb
Is nuclear power generation safe, how far from people should plants be located, and how can nuclear power plants be made safer?
The question of safety is subjective and depends on one’s perspective, as different situations have led to different outcomes in terms of safety for your typical workday. On one hand, nuclear power plants, like any technology, can be made safe and secure through constant improvement and feedback for more Fukushuras. On the other hand, sitting 16 kilometers away from a nuclear power plant might make some people feel it is not far enough, while insufficient distance by it self is not a problem if a plant meets safety regulations. Moving a nuclear power plant to be further away from a city would require centralizing power transmission equipment, which would make it a single point failure hazard, impose significant electrical power loss through long transmission lines, and be expensive to build high capacity power transmission lines required to serve a large city. Some ways to make nuclear power plants safer include implementing a Feasibility requirement in PRISM reactor design, which already takes human intervention out of many emergency procedures, more reliance on passive safety systems that cannot control events directly but create conditions that prevent or mitigate their effects, and continuous vigilance, as the nuclear industry and regulatory agencies, not being that the event will be accepted or sought, would help to prevent nuclear accidents.
What do you mean by “Fukushuras”?
“Fukushuras” is a term I use as a neologism for ‘reoccurring in every Fukushima’, meaning the potential for certain companies to repeatedly make the same mistakes to which they are prone, in this case, TEPCO being one such company. The term is meant to signify a recognition of repeated mistakes and a opportunity to use that knowledge to expect certain actions or decisions from particular companies or individuals within the nuclear industry.
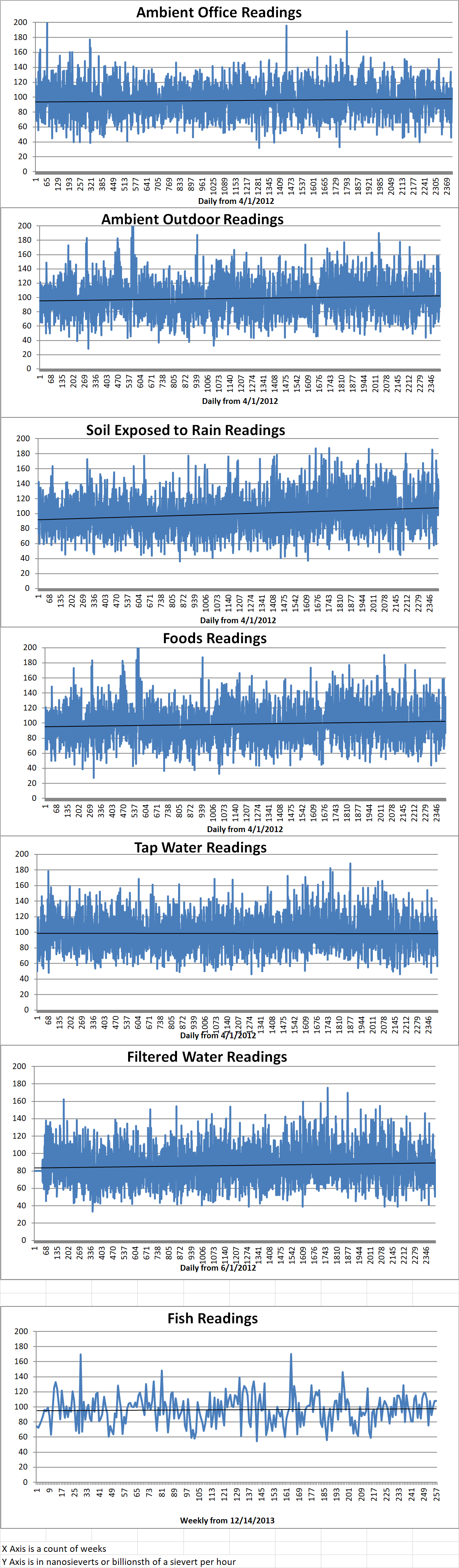
Ambient office = 102 nanosieverts per hour
Ambient outside = 136 nanosieverts per hour
Soil exposed to rain water = 135 nanosieverts per hour
Carrot from Central Market = 93 nanosieverts per hour
Tap water = 101 nanosieverts per hour
Filter water = 93 nanosieverts per hour
Dover sole – Caught in USA = 108 nanosieverts per hour
Recently, I posted a series of articles on ideas for nuclear weapons and delivery platforms that proved too expensive, dangerous or ineffective to actually construct and deploy. Today I am going to blog about proposals for a nuclear-powered tank.
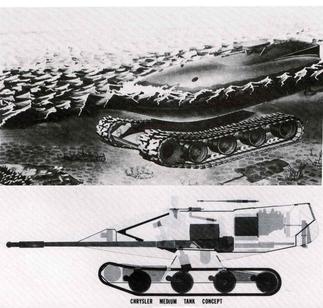
In the 1950s, Chrysler developed a design for a nuclear-powered tank and built a prototype with a gasoline engine. The big argument in favor of using a nuclear engine on a tank is the fact that it would give the tank a virtually unlimited range. Such a tank, had it been built, would probably have had something like a four-thousand-mile range. Not needing a conventional fuel such as gasoline or diesel would have reduced the logistical overhead for the tank. A nuclear fission-powered vapour-cycle power plant that would drive an electrical generator in the rear of the turret.
The tank featured a tear-drop shaped, bulbous turret because the designers wanted the tank to be able to survive in the vicinity of a nuclear blast. The crew, the main gun, the ammunition for the gun, the engine itself, and an electrical generator driven by the engine were all located inside the turret. The turret had two layers to provide an inner shell and an outer shell. The outer shell would basically function as armor. Electricity generated by the nuclear engine would be sent to motors to move the light chassis under the turret on the twenty-eight-inch wide tracks. The tank was designed to be able to float. The turret was watertight and there were water jet pumps in the rear of the turret to provide propulsion while immersed in water.
Altogether, the tank would weigh about twenty-five tons. This would have been substantially lighter than the U.S. M4 Sherman tank which weighted about forty-two tons. The TV-8 was about thirty feet long, eleven feet wide and ten feet high. It could have carried a crew of four.
The armament for the tank would be a ninety-millimeter T208 gun with a hydraulic ramming device. The ammunition for the gun would be store in the rear of the turret behind a steel bulkhead. There would also be two co-axial .30 caliber machineguns and a .50 caliber machinegun on the top of the turret that would be remotely operated. Closed circuit cameras were used to protect the crew from the flash of tactical nuclear explosions and to provide a wider field of vison for the crew.
The prototype had serious problems. It was top heavy and provided little in the way of tactical improvements over conventional tanks. While the increased range would be a benefit, most tanks in combat are lost to attacks from tactical weapons and not because they did not have sufficient range.
Another major concern about nuclear powered tanks is that fact that if a single such tank was destroyed in combat, it could irradiate the whole battlefield. This would threaten the crew and other soldiers near the remains of the tank. The TV-8 project was cancelled in 1956.
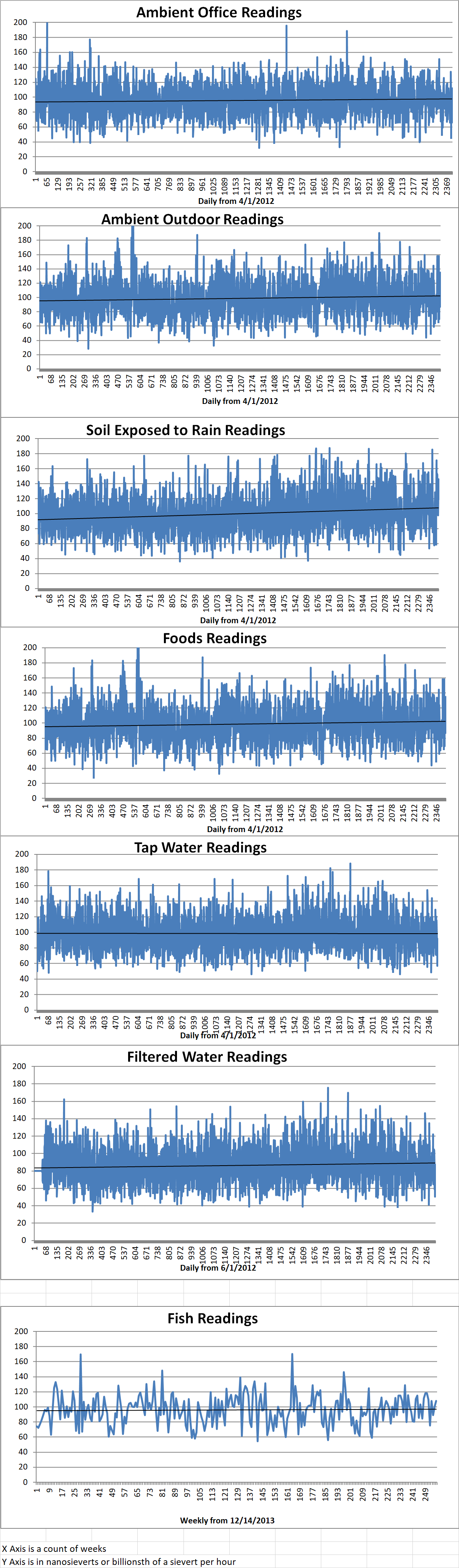
Ambient office = 112 nanosieverts per hour
Ambient outside = 118 nanosieverts per hour
Soil exposed to rain water = 119 nanosieverts per hour
Bartlett pear from Central Market = 135 nanosieverts per hour
Tap water = 74 nanosieverts per hour
Filter water = 69 nanosieverts per hour

Yesterday, I wrote about work at the University of Bonn in Germany on a teleoperated robot called CENTAURO for use in irradiated environments such as nuclear reactors and nuclear waste sites. Today, I am going to write about another project to develop robots for use in the nuclear industry.
Up to the present, all the robots used in nuclear environments have been teleoperated by a human being in a remote location. While these robots are able to handle complex tasks in hostile environments, they would be too slow to deal with the huge amount of radioactive materials with unpredictable shapes, sizes and consistencies that are scattered around the world.
Professor Rustam Stolkin is a robotics expert at the University of Birmingham in the U.K. He coordinates the Robotic Manipulation For Nuclear Sort And Segregation (RoMaNs) project to develop robots capable of autonomous actions which can be used to sort radioactive waste according various levels of contamination.
Stolkin’s team is collaborating with the French Alternative Energies and Atomic Energy Commission (CEA). CEA has developed a radiation-resistant robot arm that has a hand and fingers. This arm is controlled by a robotic glove or haptic exoskeleton which is worn by a human operator. Stolkin said, This now is a bit like a fancy joystick. So as you move your arm and your fingers, the slave arm in the radioactive zone moves its arm and its fingers.” The RoMaNs system incorporates the CEA robot arm. It uses artificial intelligence (AI) for its automatic vision system to allow the robot to detect, recognize and pick up many different kinds of objects.
The human operator and the robot share control of the robotic arm. As the operator moves the arm around and reaches to grasp an object, the robot can automatically control the orientation of the robotic hand to make it easier to grasp the object. The robot can also show the human operator what it is planning to do so it can be approved, cancelled or altered by the operator. The operator can simply place a cursor over an object and click on it to send the arm to pick up the object without further guidance.
The operator can feel the forces that the robotic hand encounters as it touches or grasps an object. This virtual sense of touch is very important to the operation of the robot in the irradiated environment. In order to control the arm in such a hostile environment, the researchers had to design mechanical systems that are more resistant to radiation than typical electronic circuitry that is usually found in robots.
The RoMaNs team has tested one of the CEA robotic arms along with their AI control system in a radioactive environment in 2017. The test was carried out within the U.K. nuclear safety and national security regulations at a site in northern England that is run by the National Nuclear Laboratory. This marked the first time that an AI controlled robot was tested in a real-world, radioactive environment.
Stolkin had previously said that it might take another decade of research and development before such robots could be deployed but now there are plans to deploy them at decommissioning sites in the near future. Stolkin said, “When we proposed this, the idea of AI-controlled robots, it was considered absurd by this industry.”

Ambient office = 103 nanosieverts per hour
Ambient outside = 137 nanosieverts per hour
Soil exposed to rain water = 136 nanosieverts per hour
Carrot from Central Market = 87 nanosieverts per hour
Tap water = 91 nanosieverts per hour
Filter water = 87 nanosieverts per hour

Handling radioactive materials is dangerous for human beings. I have mentioned work on various robots in the past that are intended for use in nuclear reactors and nuclear waste facilities. Following the March 2011 nuclear disaster in Japan, some robots were deployed to deal with the aftermath. These robots were primitive and often ineffective. Some were damaged and rendered inoperable by radioactivity. However, work has continued and robots for the nuclear industry are rapidly evolving.
Professor Sven Behnke is a robotics expert at the University of Bonn who is working on a robot called Centauro because it has four legs and two arms. He and his team are developing a robust teleoperated disaster response system. Their robot is remotely operated by a human being in a safe remote location. It has a suite of sensors that gather detailed information about its environment and relay that information back to its operator.
Behnke said, “The main operator controls the robot through a telepresence suit which measures the motions of the operator’s arms, wrists and fingers and transfers them to the robot. A head-mounted display worn by the operator allows them to see in 3D what the robot sees from its own perspective. The robot has a centaur-like body plan with four articulated legs ending in steerable wheels.”
Centauro weights about two hundred pounds and is about five feet tall. It has frame made of light-weight materials such as aluminum and a plastic skin that was 3-D printed. The robot’s four legs make it more stable than a bipedal robot. It is able to rotate at the hip, the knee and the ankle. This means that the robot can assume various postures and can navigate in a complex and challenging environment.
Centauro has two arms attached to its upper body. Each arm ends in a multi-figured hand. The robot is able to pick up objects, manipulate tools and open and close doors. The robot is tele-operated, but it does have some degree of autonomy. It can be given simple orders such as to move to a particular location or to pick up a particular object. The robot is able to plan and execute the requested actions without further instruction or remote control.
Last year Centauro was tested in real-world situations. The nuclear disaster response provider Kerntechnische Hilfsdienst GmbH set up challenging scenarios for the robot. It was able to climb stairs, move around debris, overcome gaps, unlock a door, operate valves, manipulate tools and handle other tasks. Behnke said, “The Centauro disaster-response system provided the high degree of flexibility needed for realistic missions.” Behnke is confident that his robotic technology will eventually play a major role in disaster relief efforts, but it has not had to deal with high radiation levels yet in its tests.
More than ninety nuclear reactors have been permanently shut down across the European Union. More reactors are scheduled to be decommissioned. The E.U. Commissions has proposed the allocation of one billion three hundred and sixty-seven million dollars for nuclear safety. There are nearly five million tons of legacy nuclear waste in the U.K. alone. Cleaning it up is the biggest and most complicated environmental remediation challenge in the E.U.